เทอร์โมคัปเปิล คืออุปกรณ์วัดอุณหภูมิโดยใช้หลักการเปลี่ยนแปลงอุณหภูมิหรือความร้อนเป็นแรงเคลื่อนไฟฟ้า (emf) เทอร์โมคัปเปิลทำมาจากโลหะตัวนำที่ต่างชนิดกัน 2 ตัว (แตกต่างกันทางโครงสร้างของอะตอม) นำมาเชื่อมต่อปลายทั้งสองเข้าด้วยกันที่ปลายด้านหนึ่ง เรียกว่าจุดวัดอุณหภูมิ ส่วนปลายอีกด้านหนึ่งปล่อยเปิดไว้ เรียกว่าจุดอ้างอิง หากจุดวัดอุณหภูมิและจุดอ้างอิงมีอุณหภูมิต่างกันก็จะทำให้มีการนำกระแสในวงจรเทอร์โมคัปเปิลทั้งสองข้าง ปรากฎการณ์ดังกล่าวนี้ค้นพบโดย Thomus Seebeck นักวิทยาศาสตร์ชาวเยอรมันในปี ค.ศ.1821 ในรูปที่2 เป็นวงจรที่ใช้อธิบายผลของซีแบ็คดังกล่าว
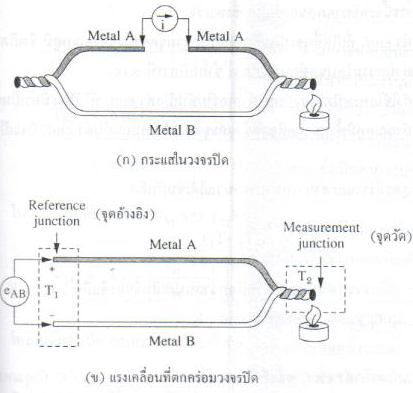
รูปที่2 แสดงผลของซีแบ็ค
ผลของแรงเคลื่อนไฟฟ้าจากความร้อน (Termoelectric Effect)
ทฤษฎีพื้นฐานของผลจากเทอร์โมอิเล็กทริก เกิดจากการส่งผ่านทางไฟฟ้าและทางความร้อนของโลหะที่ต่างกันจึงทำให้เกิดความต่างศักย์ทางไฟฟ้าตกคร่อมที่โลหะนั้น ความต่างศักย์นี้จะสัมพันธ์กับความจริงที่ว่า อิเล็กตรอนในปลายด้านร้อนของโลหะจะมีพลังงานความร้อนมากกว่าปลายทางด้านเย็น จึงทำให้อิเล็กตรอนมีความเร็วไปหาปลายด้านเย็น ที่อุณหภูมิเดียวกันนี้การเคลื่อนที่ของอิเล็กตรอนจะแปลเปลี่ยนไปตามโลหะที่ต่างชนิดกันด้วย ที่เป็นเช่นนี้ก็เพราะว่า โลหะที่ต่างกันจะมีการนำความร้อนที่ต่างกันนั่นเอง
1.ผลของซีแบ็ค (Seebeck Effect) โดยใช้ทฤษฎีโซลิดสเตด เราสามารถวิเคราะห์ค่าได้จากสมการอินทิเกรตค่าจากย่านของอุณหภูมิดังกล่าวนั่นคือ
สมการนี้จะอธิบายผลของซีแบ็ค ซึ่งพบว่า
1.ค่า emf. ที่เกิดจะเป็นสัดส่วนกับความแตกต่างของอุณหภูมิ จึงเกิดความแตกต่างของ ค่าคงที่ในการส่งผ่านความร้อนของโลหะ
2. ถ้าใช้โลหะชนิดเดียวกันมาทำเทอร์โมคัปเปิลค่าemf. ที่ได้ก็จะมีค่าเป็นศูนย์
3. ถ้าอุณหภูมิทั้งสองจุดคือจุดวัดและจุดอ้างอิงเหมือนกันค่า emf. ก็จะเป็นศูนย์
โดยสูตรที่ง่ายและสามารถนำมาคำนวณได้เช่นกันคือ
เมื่อ = ค่าคงที่หรือเรียกว่าสัมประสิทธิ์ของซีแบ็ค ; volts/K
T1, T2 = อุณหภูมิที่จุดต่อ ; K
2.ผลของเพลเทียร์ (Peltier Effects) หากคิดย้อนกลับจากผลของซีแบ็ค นั่นคือใช้โลหะที่แตกต่างกันสองชนิดมาเชื่อมต่อทั้งสองเข้าด้วยกันแล้วจ่ายพลังงานจากภายนอกเข้าไป ก็จะเป็นเหตุให้เกิดกระแสไหลในวงจร เพราะจากคุณสมบัติในการส่งไฟฟ้าและความร้อนของโลหะ พบว่าขั้วหนึ่งจะเกิดความร้อน (T2)และอีกขั้วหนึ่งจะเกิดความเย็น (T1) ขึ้น โดยผลดังกล่าวเรียกว่า “ผลของเพลเทียร์” (Peltier effect) และถูกนำไปใช้งานพิเศษสำหรับการทำความเย็นกับส่วนของระบบอิเล็กทรอนิกส์ หรือแม้กระทั่งเครื่องทำความเย็นขนาดเล็ก

รูปที่ 3 แสดงผลของเพลเทียร์
ตารางแสดงแรงเคลื่อนของเทอร์โมคัปเปิล (Thermocouple Table)
ตารางเทอร์โมคัปเปิลจะให้แรงเคลื่อนสำหรับเทอร์โมคัปเปิลแต่ละชนิด เมื่ออ้างอิงกับจุดอ้างอิงที่กำหนด (00c) ณ อุณหภูมิที่จุดวัดต่างๆ พบว่าที่อุณหภูมิ 2100c เทอร์โมคัปเปิลชนิด j เมื่ออ้างอิงที่ 00c จะมีแรงเคลื่อนเป็น
V(2100c) = 11.3 mV(ชนิด J, 00c ref.)
ในทางกลับกัน ถ้าเราวัดแรงเคลื่อนได้ 4.768 mV กับชนิด s และอุณหภูมิอ้างอิงที่ 00cเราพบว่า
T(4.768 mv) = 5550c (ชนิด s, 00c ref.)
แต่บางกรณี แรงเคลื่อนที่วัดได้จะไม่ตรงกับค่าในตาราง จึงจำเป็นต้องมีการแบ่งสเกล(interpole) ระหว่างค่าในตาราง ซึ่งหาได้จากสมการการแบ่งสเกลดังนี้
เมื่อ VM = คือแรงเคลื่อนที่วัดได้จากมิเตอร์
VH และ VL = ค่าแรงเคลื่อนของ TH และ TL อ่านได้จากตารางโดย VH อยู่สูง
กว่า VM และ VL ต่ำกว่า VM
TH และ TL = ค่าอุณหภูมิที่ตรงกับค่าแรงเคลื่อน VH และ VL ตามลำดับ
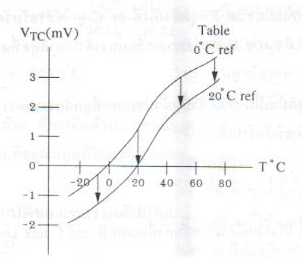
การเปลี่ยนจุดอ้างอิงของตาราง ( Change of Table Reference)
หากอุณหภูมิอ้างอิงแตกต่างจากตารางเทอร์โมคัปเปิลที่กำหนดไว้ เราก็ยังสามารุถใช้ค่าจากตารางนี้เป็นฐานในการคำนวณได้ ข้อควรจำคือเมื่อวัดอุณหภูมิเดียวกันแต่เปลี่ยนไปใช้จุดอ้างอิงที่สูงกว่าจะทำให้แรงเคลื่อนทางเอ้าท์พุตถูกกดให้ต่ำลง ดังรูปที่ 4
เช่นนำเทอร์โมคัปเปิลชนิด J ซึ่งมีจุดอ้างอิงที่ 30 0c ไปวัดที่ 4000c วิธีการหาแรงเคลื่อนใหม่ที่ได้คือ ขั้นแรกหาแรงเคลื่อน ณ อุณหภูมิที่ต้องการอ้างอิงใหม่จากตาราง ใหนที่นี้คือ 300c ณ จุดอ้างอิง 00c จากภาพผนวก ข. พบว่ามีแรงเคลื่อน 1.54 mV (เรียกค่าที่หาได้นี้ว่าตัวประกอบ) หลังจากนั้นก็นำค่านี้ไปลบออกจากแรงเคลื่อนที่จุดวัดที่ 400 0c เมื่อจุดอ้างอิงเป็น 00c หรือเขียนเป็นขั้นตอนได้ดังนี้
รูปที่ 4 แสดงการเปลี่ยนจุดอ้างอิงจาก 0 ถึง 200C ซึ่งจะสมดุลกับ
การเลื่อนลงของเส้นโค้งแรงเคลื่อนเทอร์โมคัปเปิล
V(300c) = 1.54 mV (ชนิด J , 00c ref.) ขั้นแรก
และ V(4000c) = 21.85 mV (ชนิด J ,00c ref.)ขั้นที่สอง
นำค่า (ตัวประกอบ) ที่ได้จากขั้นที่สองมาลบออกจากขั้นแรก ทำให้ได้แรงเคลื่อนซึ่งขึ้นอยู่กับความแตกต่างนี้เป็น
V(4000c) = 20.31 mV (ชนิด J ,300c ref.)
เพื่อหลีกเลี่ยงความสับสนของจุดอ้างอิงจะเขียนในแบบใหม่ เช่น Vj0 จะหมายถึงแรงเคลื่อนของเทอร์โมคัปเปิลชนิด J อ้างอิงที่ 0 0c และ Vj30 หมายถึงของชนิด J อ้างอิงที่ 300c
คุณสมบัติของเทอร์โมคัปเปิลแบบมาตรฐาน(Characteristic of Standard Thermocouples)
1.ความไว (Sensitivity) จากตารางแรงเคลื่อนของ NBS แสดงว่าย่านของแรงเคลื่อนจากเทอร์โมคัปเปิลจะมีค่าน้อยกว่า 100 mV แต่ความไวที่แท้จริงในการใช้งานจะขึ้นอยู่กับการใช้วงจรปรับสภาพสัญญาณและตัวเทอร์โมคัปเปิลเอง
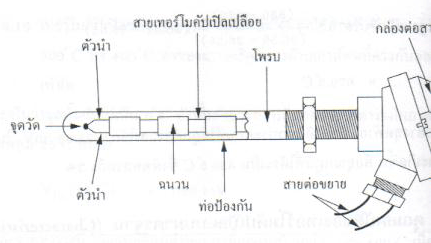
รูปที่5 แสดงโครงสร้างของเทอร์โมคัปเปิล
2.โครงสร้าง (Construction) โครงสร้างของเทอร์โมคัปเปิลมีลักษณดังรูปที่5 โดยต้องมีลักษณะดังนี้คือ: มีความต้านทานต่ำ ให้สัมประสิทธิ์อุณหภูมิสูง ต้านทานต่อการเกิดออกไซด์ที่อุณหภูมิสูงๆ ทนต่อสภาวะแวดล้อมที่นำไปใช้วัดค่า และเป็นเชิงเส้นสูงที่สุดเท่าที่จะเป็นไปได้ ตัวฝักหรือท่อป้องกันส่วนมากจะทำจากแสตนเลส ความไวของเทอร์โมคัปเปิลขึ้นอยู่กับความหนาของท่อป้องกันทั้งเยอรมันเนียมและซิลิคอนจะทำให้คุณสมบัติการเกิดเทอโมอิเล็กทริกจึงใช้กันมากในอุปกรณ์ทำความเย็น (peltier element) มากกว่าที่จะใช้เป็นเทอร์โมคัปเปิลวัดอุณหภูมิ
ขนาดของสายเทอร์โมคัปเปิลกำหนดได้จากการใช้งานแต่ละอย่าง และมีขนาดจาก #10 ในสภาวะแวดล้อมที่ไม่คงที่ จนถึงขนาด # 30 หรือแม้กระทั่ง 0.02 mm ซึ่งเป็นสายแบบไมโครไวร์(microwire) ที่ใช้กับการวัดอุณหภูมิการกลั่นในงานทางชีววิทยา
3.ย่านการใช้งาน (Range) ย่านอุณหภูมิการใช้งานและความไวในการวัดของเทอร์โมคัปเปิล แต่ละตัว จะแตกต่างกันตามแต่ละสมาคมจะกำหนด ในส่วนที่สำคัญคือค่าแรงเคลื่อนที่ออกมาจากแต่ละอุณหภูมิ จะต้องอ้างอิงกับตารางค่ามาตรฐานของแต่ละสมาคมที่ใช้ให้ถูกต้องเป็นเอกภาพเดียวกันหมดทั้งระบบ
4. เวลาตอบสนอง (Time Response) เวลาตอบสนองของเทอร์โมคัปเปิลขึ้นอยู่กับขนาดของสายและวัสดุที่นำมาทำท่อป้องกันตัวเทอร์โมคัปเปิล
5.การปรับสภาพสัญญาณ (Signal Conditioning) ปกติแรงเคลื่อนของเทอร์โมคัปเปิลจะมีขนาดน้อยมากจึงจำเป็นต้องมีการขยายสัญญาณโดยใช้ออปแอมป์ขยายความแตกต่างที่มีอัตราขยายสูงๆ
การใช้งานเทอร์โมคัปเปิลมาตรฐาน (Characteristic in Application of Thermocouple Standard Type)
ในปัจจุบัน พบว่ามีเทอร์โมคัปเปิลมาตรฐานอยู่ 7 ชนิดตามมาตรฐานของ ANSI และ ASTM โดยการจำแนกตามประเภทของวัสดุที่ใช้ทำได้แก่
1.เทอร์โมคัปเปิลแบบ S ประดิษฐ์โดยนาย Le Chatelier ในปี 1886
ข้อดีของแบบ S
- เหมาะกับการใช้งานในสภาวะที่เกิดปฏิกิริยาเคมีแบบออกซิไดซิง(oxidizing)
- เหมาะกับการใช้งานในสภาวะงานเฉื่อย (inert) คืองานที่ไม่เปลี่ยนแปลงปฏิกิริยาใดๆ ได้ง่าย ๆ
- นิยมใช้กับงานวัดตัวแปรที่มีอุณหภูมิสูง เช่น เตาหลอมเหล็ก
- วัดอุณหภูมิต่อเนื่องได้จากช่วง 0 ถึง 15500c และอุณหภูมิช่วงสั้นได้จากช่วงประมาณ –50ถึงประมาณ 17000c
- หากอยู่ภายใต้สภาวะที่เหมาะสมจะให้ความเที่ยงตรงสูงที่สุด
- ใช้ในการสอบเทียบ ตั้งแต่จุดแข็งตัวของแอนติโมนี (630.740c) จนถึงจุดแข็งตัวของทองแดง (1064.430c) ตามมาตรฐาน IPTS 68
ข้อเสียของแบบ s
- ต้องใช้ท่อป้องกันในทุกสภาวะบรรยากาศ
- ไม่เหมาะกับงานที่มีปฏิกิริยาแบบรีดิวซิง (reduzing)
- ไม่เหมาะกับงานที่เป็นสูญญากาศ(vacuum)
- ไม่เหมาะกับงานที่มีไอโลหะ เช่น สังกะสี ตะกั่ว
- ไม่เหมาะกับงานที่มีไอของอโลหะ เช่น จำพวก อาเซนิก ซัลเฟอร์ ฟอสฟอรัส เพราะจะมีอายุการใช้งานสั้นลง
2.เทอร์โมคัปเปิลแบบ R เป็นแบบที่เหมาะกับการวัดอุณหภูมิสูง ๆ
ข้อดีของแบบ R
- ให้แรงเคลื่อนทางด้านเอาท์พุตสูงกว่าแบบ S
- วัดอุณหภูมิต่อเนื่องได้จากช่วง 0 ถึง 16000c
- วัดอุณหภูมิช่วงสั้นได้จากช่วง-50 ถึงประมาณ 17000c
- เหมาะกับการวัดอุณหภูมิสูงๆ เช่น ในเตาหลอมเหล็ก อุตสาหกรรมแก้ว
- ทนทานต่อการกัดกร่อน และให้เสถียรภาพของอุณหภูมิที่ดี
ส่วนลักษณะข้อเสียเช่นเดียวกับแบบ S แต่ส่วนที่เพิ่มเติมคือ ให้ความเป็นเชิงเส้นต่ำเพิ่ม
อุณหภูมิต่ำกว่า 5400c
3.เทอร์โมคัปเปิลแบบ B ผลิตครั้งแรกเมื่อปี 1954 ในประเทศเยอรมัน
ข้อดีของแบบ B
- วัดอุณหภูมิต่อเนื่องได้จากช่วงประมาณ 100 ถึงประมาณ 16000c
- วัดอุณหภูมิช่วงสั้นได้จากช่วงประมาณ 50 ถึงประมาณ 17500c
- แข็งแรงกว่าแบบ S และแบบ R
- เหมาะกับการใช้งานในสภาวะที่มีปฏิกิริยาแบบออกซิไดซิงและสภาวะเฉื่อย ให้ความเป็นเชิงเส้นของสัญญาณ (linearity) ดี
ข้อเสียของแบบ B
- ให้แรงเคลื่อนของไฟฟ้าน้อยกว่าแบบอื่น ๆ เมื่อวัดอุณหภูมิที่เงื่อนไขเดียวกัน
- ไม่เหมาะกับสภาวะที่ก่อให้เกิดปฏิกิริยาแบบรีดิวซิง
- ไม่เหมาะกับสภาวะที่เป็นสุญญากาศ
- ไม่เหมาะกับสภาพงานที่มีไอของโลหะและอโลหะเช่นเดียวกับแบบ Rและ S
- ให้ค่าแรงเคลื่อนไฟฟ้าสองค่า (double value region)จากอุณหภูมิในช่วง
0-42 0c(ดังรูปตัวอย่างด้านล่าง) ทำให้ไม่สามารถทาราบได้ว่าที่แรงเคลื่อนไฟฟ้านั้นมี
อุณหภูมิเป็นเท่าใด เช่นที่อุณหภูมิ 00cจะแรงเลื่อนไฟฟ้าเท่ากับ 420c
- ให้ความชัน(การเปลี่ยนแปลงแรงเคลื่อนต่ออุณหภูมิ) ของสัญญาณต่ำกว่าแบบอื่น ๆ
4.เทอร์โมคัปเปิลแบบ J พบว่าหากใช้แพลทินัมมาทำเป็นเทอร์โมคัปเปิลความคุ้มทุนก็ลดลงไป ดังนั้นเพื่อที่จะทำให้เทอร์โมคัปเปิลราคาถูกลง จึงใช้วัตถุธาตุอื่นที่มีราคาถูกกว่ามาทดแทนแพลทินัม โดยรหัสสีตามมาตรฐาน BS มีดังนี้ ถ้าขั้วบวก จะเป็นสีดำ ขั้วลบจะเป็นสีขาว ทั้งตัวจะเป็นสีดำ
ความแน่นอนตามมาตรฐาน BS 1797 Part 30 , 1993ได้แก่
1. Class 1 = -400C ถึง +7500C 0.004 x t หรือ 1.50C
2. Class 2 = -400C ถึง + 7500C 0.0075 x t หรือ 2.50C
เมื่อ t คือ อุณหภูมิจริง
ข้อดีของแบบ J
- ให้อัตราการเปลี่ยนแปลงแรงเคลื่อนไฟฟ้าต่ออุณหภูมิได้ดี
- มีราคาถูกกว่าแบบที่ทำจากธาตุบริสุทธิ์
- ตามมาตรฐาน BS 7937 Part 30 สามารถวัดอุณหภูมิได้ต่อเนื่องจากช่วงประมาณ –210 ถึง 12000c
- เหมาะกับสภาพงานที่เป็นสุญญากาศงานที่ งานที่ก่อให้เกิดปฏิกิริยาออกซิไดซิง และงานที่อยู่ในสภาพเฉื่อย เมื่ออุณหภูมิไม่เกิน 7600c
- นิยมใช้ในอุตสาหกรรมพลาสติก
- เป็นแบบที่นิยมใช้ ราคาไม่แพง
ข้อเสียของแบบ J
- วัดอุณหภูมิได้ต่ำกว่าแบบ T
- ไม่เหมาะสมมากนักกับงานที่มีอุณหภูมิต่ำกว่า 00c
- หากวัดที่อุณหภูมิสูงกว่า 5380c จะเกิดปฏิกิริยาออกซิไดซิงที่สายซึ่งทำจากเหล็กด้วยอัตราสูง
- หากใช้งานนานเกินช่วง 20 ปี ส่วนผสมทางเคมี คือ แมงกานีสในเหล็กจะเพิ่มขึ้น 0.5% ทำให้คุณสมบัติของแรงเคลื่อนไฟฟ้าเปลี่ยนแปลงตามไปด้วย
5.เทอร์โมคัปเปิลแบบ K ธาตุหนึ่งที่เป็นฐานสำหรับการสร้างคือ นิกเกิล เทอร์โมคัปเปิลชนิดนี้เริ่มผลิตให้เป็นมาตรฐานตั้งแต่ปี ค.ศ. 1916 โดยพื้นฐานการผลิต ขั้วหนึ่งจะเป็นนิกเกิลที่เจือปนด้วยอะลูมิเนียมส่วนอีกด้านที่เจือปนด้วยโครเมียม เพราะว่าในปี ค.ศ. 1916 ยังไม่สามารถสร้าง
นิเกิลลบบริสุทธิ์ได้จึงได้เติมสารไม่บริสุทธิ์ต่าง ๆ ในส่วนผสมของวัสดุชนิด K แต่ในปัจจุบันได้มีการระมัดระวังส่วนผสมที่จะทำให้เกิดความไม่บริสุทธิ์ดังกล่าวเพื่อเหตุผลในการบำรุงรักษาและสอบเทียบ
ด้วยเหตุนี้เทอร์มคัปเปิลชนิด K ที่กำหนดเป็นค่ามาตรฐานจะไม่ใช้โลหะผสมแต่โดยทั่วไปจะผสมธาตุพิเศษเข้าไปเพื่อปรับปรุงคุณภาพของแรงเคลื่อน/อุณหภูมิของจุดหลอมละลายที่กำหนดไว้ข้อควรระวังในการใช้งานของชนิด K มีดังนี้
- ขั้วลบของเทอร์โมคัปเปิลจะเป็นวัสดุเฟอร์โรแมกเนติก (เหล็กที่เป็นสารแม่เหล็ก) ที่อุณหภูมิห้อง แต่ที่จุดคิวรีของมัน ( curie point คืออุณหภูมิที่มันเปลี่ยนจากคุณสมบัติเหล็กไปเป็นแม่เหล็ก) อยู่ในช่วงที่ใช้งานพอดี ทำให้เกิดการเปลี่ยนแปลงแรงเคลื่อนทางเอาต์พุตอย่างทันทีทันใด ยิ่งไปกว่านั้นพบว่าจุดคิวรีดังกล่าวจะขึ้นอยู่กับความเข้มข้นของโลหะผสม จุคิวรีนี้จะเปลี่ยนคุณสมบัติจากเทอร์โมคัปเปิลตัวหนึ่งให้เป็นเทอร์โมคัปเปิลอีกตัวหนึ่ง ดังนั้นจึงต้องทดลองหาการเปลี่ยนแปลงแรงเคลื่อนที่ไม่ทราบค่า ณ อุณหภูมิที่เราไม่ทราบค่านี้
- ที่อุณหภูมิสูง ๆ (ช่วง 2000c ถึง 6000c )เทอร์โมคัปเปิลชนิด K จะมีผลของฮีสเตอร์รีซีสเกิดขึ้นขณะที่มันอ่านค่าเมื่ออุณหภูมิเพิ่มขึ้นและในช่วงที่อุณหภูมิลดลง ซึ่งเป็นช่วงที่ไม่สามารถจะคาดเดาการเปลี่ยนแปลงแรงเคลื่อนได้
- ที่อุณหภูมิ 10000c ขั้วของเทอร์โมคัปเปิลชนิด K จะเกิดออกไซด์ เป็นเหตุให้มีการเปลี่ยนแปลงแรงเคลื่อน
- การใช้โคบอลต์เป็นโลหะผสมสำหรับเทอร์โมคัปเปิลชนิด K จะทำให้เกิดปัญหาในอุตสาหกรรมนิวเคลียร์ หรือในพื้นที่อื่น ๆ ที่มีฟลักซ์นิวตรอนสูง ๆ ธาตุบางตัวจะรับเอาการปลดปล่อยนิวเคลียร์ จึงทำให้เปลี่ยนแปลงแรงเคลื่อนทางด้านเอาต์พุต
ย่านการทำงานและความแน่นอนของเทอร์โมคัปเปิลในงานอุตสาหกรรม ที่กำหนดโดยมาตรฐาน IEC 584( รหัสสำหรับการวัดอุณหภูมิโดยใช้เทอร์โมคัปเปิล) ช่วงนการวัดอุณหภูมิต่อเนื่องของเทอร์โมคัปเปิลแบบนี้จะเป็น –2700c ถึง +1,3700c
โดยมีระดับความแน่นอนซึ่งกำหนดโดยมาตรฐาน IEC 584 (ตารางอ้างอิงสำหรับเทอร์โมคัปเปิลนานาชาติ เป็นดังนี้
1. Class 1 = -400C ถึง +1,0000C 0.004 x t หรือ 1.50C
2. Class 2 = -400C ถึง + 1,2000C 0.0075 x t หรือ 2.50C
3. Class 1 = -2000C ถึง +400C 0.015 x t หรือ 2.50C
เมื่อ t อุณหภูมิจริงที่ทำการวัด
รหัสสีสำหรับสายเทอร์โมคัปเปิลกำหนดโดยมาตรฐาน BS 4937 part 30 ,1993
(รหัสสีตามมาตรฐานอังกฤษสำหรับสายชดเชยแบบคู่ของเทอร์โมคัปเปิล) สำหรับชนิด K ขั้วบวกจะเป็นสีเขียว ขั้วลบจะเป็นสีขาว ถ้าตลอดทั้งตัวจะเป็นสีเขียว ส่วนสายชดเชยสัญญาณ (ชนิด vx) ก็เหมือนกับสีด้านบนที่กล่าวมา โดยสรุป
ข้อดีของแบบ K
- เป็นแบบที่นิยมใช้แพร่หลายมากที่สุด
- สำหรับการวัดอุณหภูมิช่วงสั้น ๆ จะวัดได้จาก –1800c ถึงประมาณ 1,3500c
- สามารถใช้วัดในงานที่มีปฏิกิริยาออกซิไดซิง หรือสภาวะแบบเฉื่อย(inert) ได้ดีกว่าแบบอื่น ๆ
- สามารถใช้กับสภาพงานที่มีการแผ่รังสีความร้อนได้ดี
- ให้อัตราการเปลี่ยนแรงเคลื่อนไฟฟ้าต่ออุณหภูมิดีกว่าแบบอื่น ๆ (ความชันเกือบเป็น 1) และมีความเป็นเชิงเส้นมากที่สุดในบรรดาเทอร์โมคัปเปิลด้วยกัน
ข้อเสียของแบบ K
- ไม่เหมาะกับการวัดที่ต้องสัมผัสกับปฏิกิริยารีดิวซิงและออกซิไดซิงโดยตรง
- ไม่เหมาะกับงานที่มีไอของซัลเฟอร์
- ไม่เหมาะกับสภาพงานที่เป็นสุญญากาศ (ยกเว้นจะใช้ในช่วงเวลาสั้นๆ)
- หลังการใช้งานไป 30 ปี ทำให้ส่วนผสมทางเคมีเปลี่ยนไป เป็นผลทำให้คุณสมบัติของแรงเคลื่อนไฟฟ้าเปลี่ยนไป
6.เทอร์โมคัปเปิลแบบ T
ข้อดีของแบบ T
- ดีกว่าแบบ K ตรงที่สามารถวัดอุณหภูมิได้ต่ำกว่า นั่นคือเหมาะกับการวัดอุณหภูมิต่ำกว่าจุดเยือกแข็งของน้ำ เช่นในห้องเย็น ตู้แช่แข็ง
- ให้ความแน่นอนในการวัดดีกว่าแบบ K (ช่วงที่ต่ำกว่า 1000c ความแน่นอนจะเป็น 1%)
- มีเสถียรภาพในการวัดอุณหภูมิดี
- การวัดสภาพงานที่เป็นสุญญากาศงานที่มีปฏิกิริยาแบบออกซิไดซิงรีดิวซิงและงานที่มีปฏิกิริยาแบบเฉื่อยจะทำได้ดี
- วัดอุณหภูมิอย่างต่อเนื่องได้จากช่วง –185 ถึง 3000c และวัดอุณหภูมิแบบช่วงสั้นๆ ได้จากช่วง –250 ถึง 400 0c
- ทนต่อบรรยากาศที่มีการกัดกร่อนได้ดี
ข้อเสียของแบบ T
- เป็นแบบที่วัดอุณหภูมิช่วงบวกได้น้อยกว่าแบบอี่นๆ
- หากใช้วัดอุณหภูมิที่สูงกว่า 370 0cจะทำให้เกิดออกไซมาก
- ไม่เหมาะกับการวัดอุณหภูมิที่สัมผัสกับการแผ่รังสีความร้อนโดยตรง(ทำให้ส่วนผสมของวัสดุที่ใช้ทำเปลี่ยนไป คุณสมบัติทางไฟฟ้าเปลี่ยนไปด้วย)
- เมื่อใช้งานไปนาน ๆ ในช่วง 20 ปี ส่วนผสมของนิเกิลและสังกะสี จะเพิ่มประมาณ 10% ทำให้คุณสมบัติทางไฟฟ้าเปลี่ยนแปลงไปเช่นกัน
- คุณสมบัติของแรงเคลื่อนต่ออุณหภูมิไม่เป็นเชิงเส้น (แต่ก็ปรับปรุงได้จากวงจรปรับสภาพสัญญาณ)
7.เทอร์โมคัปเปิลชนิด E
ข้อดีของแบบ E
- ให้แรงเคลื่อนไฟฟ้าสูงสุดเมื่อวัดอุณหภมิเทียบกับแบบอื่น ๆ ในสภาวะเดียวกัน
- วัดอุณหภูมิต่อเนื่องได้จากช่วง 0 ถึง 8000c
- คุณสมบัติอื่น ๆ คล้ายกับแบบ K
การแก้ไขให้ระบบวัดอุณหภูมิด้วยเทอร์โมคัปเปิลให้ทำงานได้ดีขึ้น ต้องปฏิบัติดังนี้
1.ใช้สายเทอร์โมคัปเปิลขนาดใหญ่ที่สุดที่จะเป็นไปได้ เพราะมันจะไม่พ่วงเอาความร้อนออกจากพื้นที่การวัดเข้ามา
2. ถ้าต้องการใช้สายขนาดเล็ก ๆ ให้ใช้เฉพาะในขอบเขตที่ทำการวัด และใช้สายขยาย (extention wire) ในขอบเขตที่ไม่มีการเปลี่ยนแปลงอุณหภูมิกลางสาย
3. หลีกเลี่ยงความเค้นทางกลและการสั่นสะเทือนที่มีผลให้เกิดความเครียดในสาย
4.เมื่อใช้สายเทอร์โมคัปเปิลยาว ๆ ให้ต่อชีลด์ที่สายไปยังขั้วต่อสายของดิจิตอลโวลต์
มิเตอร์ และใช้สายขยายสัญญาณแบบบิดเกลียว
5.หลีกเลี่ยงบริเวณที่เต็มไปด้วยการเปลี่ยนแปลงของอุณหภูมิกลางสาย
6.พยายามเลือกสายเทอร์โมคัปเปิลในพิกัดอุณหภูมิของมัน
7. ป้องกันวงจรแปลง integrate A/D จากการรบกวน
8. ใช้สายขยายเฉพาะที่อุณหภูมิต่ำ ๆ และการเปลี่ยนแปลงอุณหภูมิกลางสายน้อย ๆ
9. ทดสอบและเก็บค่าความต้านทานของเทอร์โมคัปเปิลเก่า ๆ ไว้ พร้อมกับวัดค่าความต้านทานของเทอร์โมคัปเปิลเก็บไว้เป็นช่วง ๆ





.gif)

.gif)
.gif)